Walking Robot – Theoretical Description and Its Practical Realization
The "Acrobot" model is used to model the motion of the biped robot. It is suitable for a rich range of achievable motions, but also allows the application of an extensive mathematical apparatus for the design of control systems for robotic walking. In the Control Theory section, we address both the theoretical problems associated with the design of algorithms for robotic walking and the practical design of this walking robot.
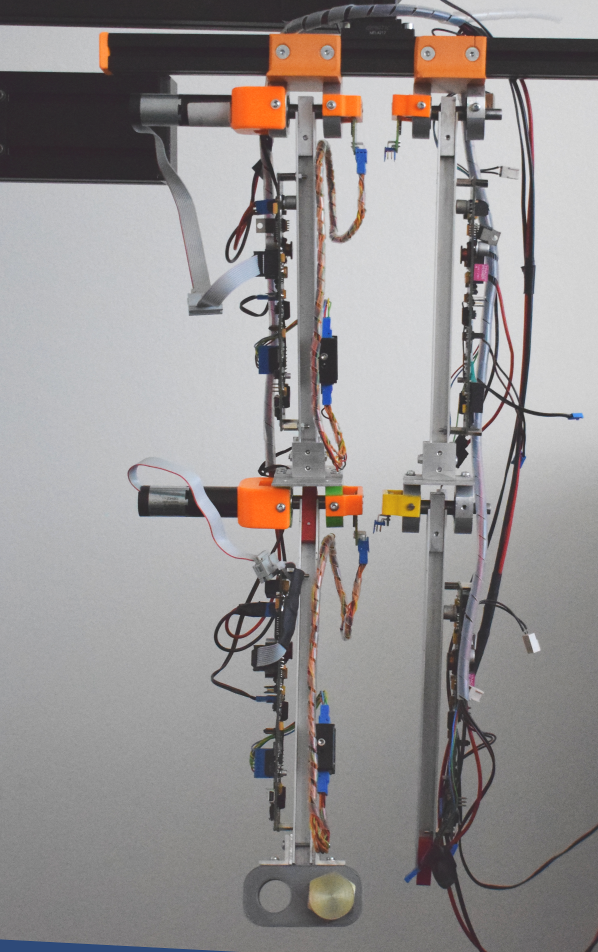
There are many different systems of walking robots. One of them is called Acrobot. This is characterized by the fact that the only actuator used to provide walking is located "in the belly", at the upper end of the robot's legs. No other actuators are used by this model for walking.

This setting has several advantages: such a robot is easy enough to describe mathematically by its behavior, which is convenient for designing algorithms that can be described exactly in the form of mathematical formulas. At the same time, the range of its achievable motions is wide enough to include complex and non-trivial motion patterns; combined with the previous property, such a system is a source of interesting mathematical problems not satisfactorily solved so far. Finally, this system is a good starting point for modeling human gait. In contrast, an abstract description using a model called "double torso", which is an abstraction of a body with one torso and two arms, is used to describe the upper body.

We focus on a mathematically accurate description of both the mechanics of the robot and its control system. This approach allows us to achieve a wide range of robot motions. The design of such a robot is another goal in this area. To do this, we also need to design a sensor system to obtain information about the robot's state (i.e., the position of its components and their velocity). The task of the proposed control system is to achieve the desired motion, while various disturbances have to be suppressed as much as possible. By accomplishing both tasks, we are able to construct a functional robot with a reliable and efficient control system to ensure its gait.

Related publications:
- ČELIKOVSKÝ, Sergej, ANDERLE, Milan. Feedback equivalence of the chained mechanical system to the almost linear form and its use for the sustainable multi-step walking design, Journal of the Franklin Institute-Engineering and Applied Mathematics, 2024, 39: 107086.
- DOLINSKÝ, Kamil, ČELIKOVSKÝ, Sergej. Application of the Method of Maximum Likelihood to Identification of Bipedal Walking Robots. IEEE Transactions on Control Systems Technology, 2018, 26: 1500-1507.
Contact person