Teorie systémů je interdisciplinární obor, který studuje komplexní, dynamické a adaptivní systémy, jejich chování a principy, jimiž se řídí jejich struktura, fungování a vývoj. Poskytuje ucelený rámec pro pochopení toho, jak různé složky systému vzájemně působí na jeho celkové chování. Teorie systémů má velký překryv s tradičním oborem Kybernetika.
Vybrané projekty
Návrh, modelování a řízení průmyslových robotů
Prováděný výzkum se zaměřuje na návrh, modelování a řízení průmyslových robotů. Návrh je orientován na vývoj nových kinematických mechanismů a systémů.
Tento výzkum rozvíjí teorii dynamického racionálního rozhodování za nejistoty. Teorie slouží pro zlepšení rozhodovacích procesů jak lidských, tak technických agentů.
Nelineární systémy poskytují přesný popis reálných procesů. Studuje se synchronizace nelineárních multiagentních systémů, navíc s ohledem na problémy jako zpoždění signálu nebo kybernetické útoky. Navíc je zkoumána synchronizace chaotických systémů.
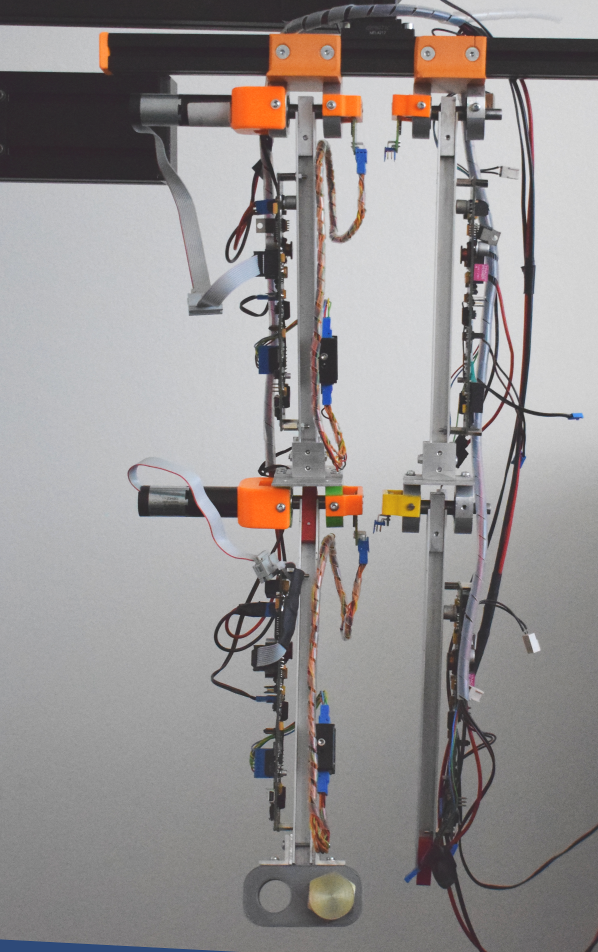
Kráčející robot – teoretický popis a praktická realizace
Pro model pohybu bipedního robota se používá model „Acrobot“. Ten je vhodný pro bohatou škálu dosažitelných pohybů, ale je umožňuje i aplikovat rozsáhlý matematický aparát pro návrh řídicích systémů pro robotickou chůzi.