Kráčející robot – teoretický popis a praktická realizace
Pro model pohybu bipedního robota se používá model „Acrobot“. Ten je vhodný pro bohatou škálu dosažitelných pohybů, ale je umožňuje i aplikovat rozsáhlý matematický aparát pro návrh řídicích systémů pro robotickou chůzi. V oddělení Teorie řízení se zabýváme jak teoretickými problémy spojenými s návrhem algoritmů pro robotickou chůzi, tak i praktickou konstrukcí tohoto kráčejícího robota.
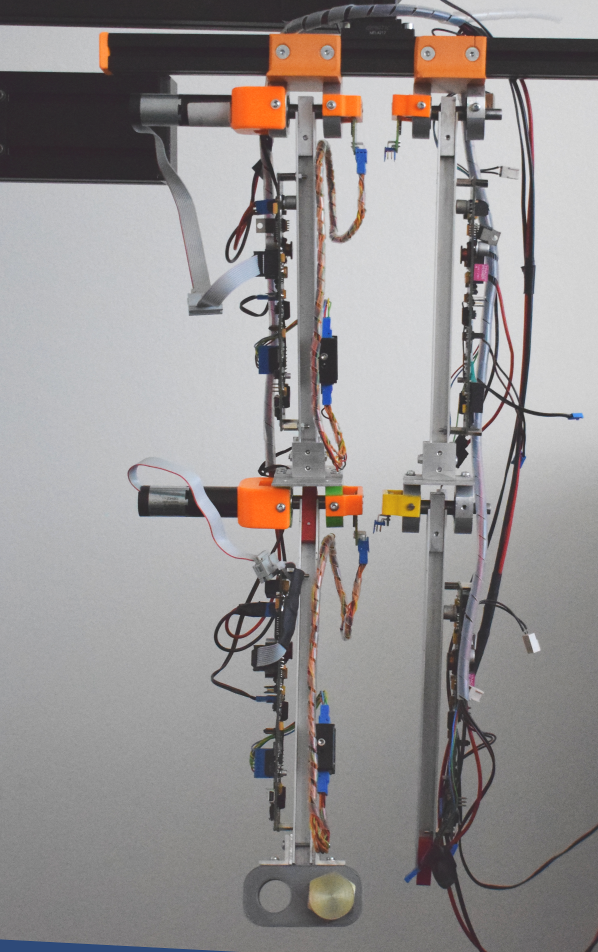
Existuje mnoho různých systémů kráčejících robotů. Jedním z nich je tzv. Acrobot. Ten je charakterizován tím, že jediný pohon použitý pro zajištění chůze se nachází „v břiše“, na horním konci robotických nohou. Další pohonné jednotky tento model pro kráčení nevyužívá.

Toto uspořádání má několik výhod: takový robot je svým chováním je dostatečně snadno matematicky popsatelný, což je výhodné pro návrh exaktně popsatelných algoritmů ve formě matematických vzorců. Zároveň škála jeho dosažitelných pohybů je dostatečně široká na to, aby zahrnovala i složité a netriviální vzorce pohybu; v kombinaci s předchozí vlastností je takovýto systém zdrojem zajímavých matematických problémů, které dodnes nejsou uspokojivě vyřešené. V neposlední řadě je tento systém dobrým východiskem pro modelování lidské chůze. Naopak pro popis horní části těla se používá abstraktní popis pomocí modelu zvaného „double torso“, které je abstrakcí těla s jedním trupem a dvěma rukama.

Zaměřujeme se na matematicky přesný popis jak mechaniky robota, tak i systému jeho řízení. Tento přístup nám umožní dosáhnout široké škály pohybů robota. Konstrukce takového robota je dalším naším cílem v této oblasti. K tomu je nutné navrhnout i systém senzorů pro získávání informací o stavu robota (tzn. o poloze jeho komponent a jejich rychlosti). Navrhovaný řídicí systém pak má za úkol dosáhnout požadovaného pohybu, zatímco rušivé vlivy okolí je nutné co nejvíce potlačit. Splněním obou úkolů se nám podaří zkonstruovat funkčního robota se spolehlivým a efektivním řízením zajišťujícím jeho chůzi.

Související publikace:
- ČELIKOVSKÝ, Sergej, ANDERLE, Milan. Feedback equivalence of the chained mechanical system to the almost linear form and its use for the sustainable multi-step walking design, Journal of the Franklin Institute-Engineering and Applied Mathematics, 2024, 39: 107086.
- DOLINSKÝ, Kamil, ČELIKOVSKÝ, Sergej. Application of the Method of Maximum Likelihood to Identification of Bipedal Walking Robots. IEEE Transactions on Control Systems Technology, 2018, 26: 1500-1507.
Kontaktní osoba